Key Takeaways
- Humanoid robot deployment mistakes cost $500K to $1M or more per failed pilot (industry data, 2026)
- Stanford University research: robots scoring 90% in simulation succeed at just 12% of real tasks (Fortune, May 2026)
- Most humanoid robots run 1 to 4 hours per charge against 8-hour manufacturing shifts. Only Leju’s KUAVO 5 exceeds a full shift with 8+ hours of runtime
- Proper deployment requires 6 to 12 months of structured pilot phases before production use, based on the Schaeffler and TMMC protocols (2026)
- GEN-1 needed half a million hours of real-world training data to reach 99% benchmark success rates (The Robot Report, April 2026)
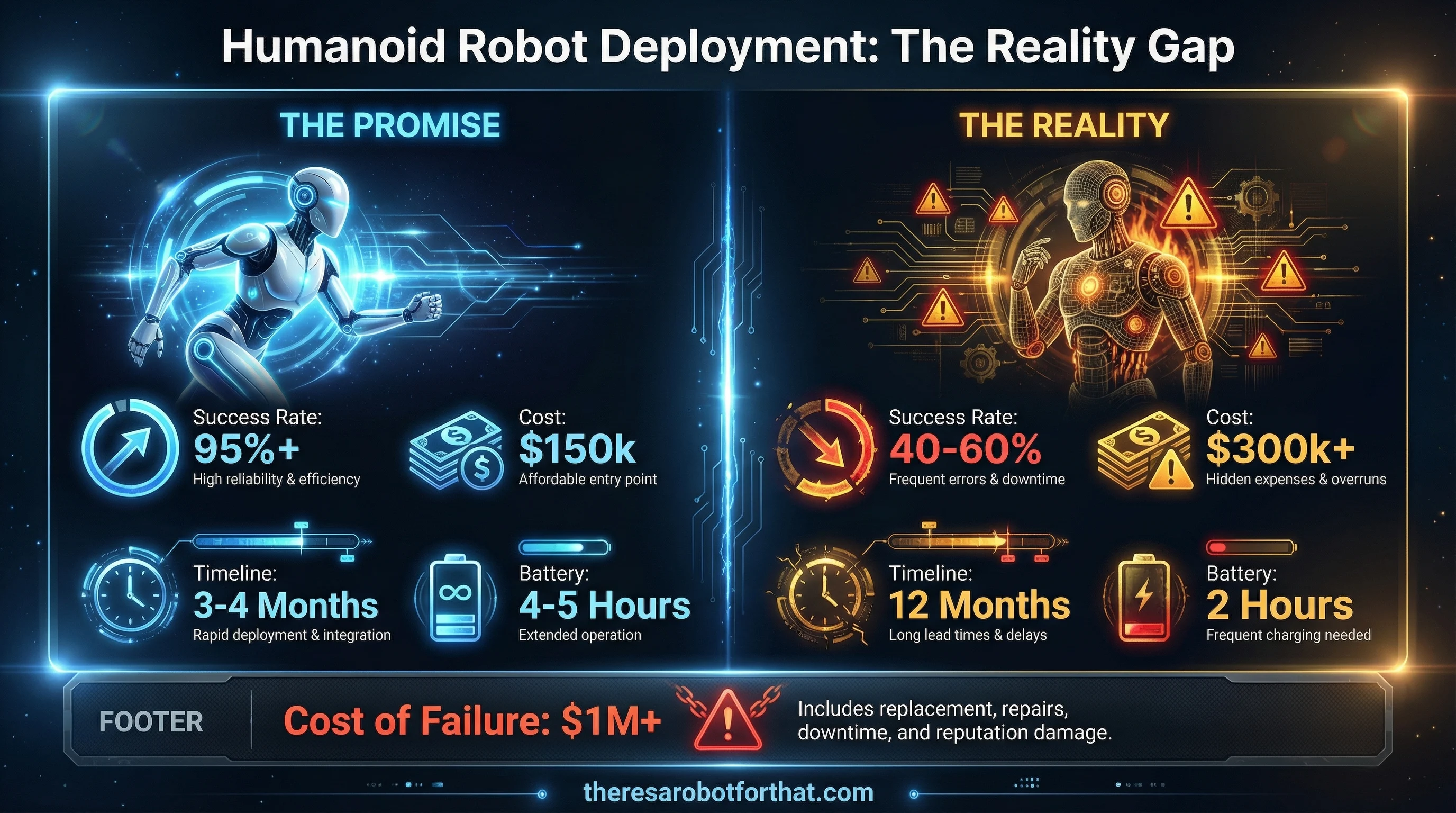
Failed humanoid robot pilots are expensive. Most manufacturing leaders encounter the worst humanoid robot deployment mistakes only after committing $500K or more. Vendor demos show 95%+ task success. Production reality delivers something far more sobering: Stanford University research published in Fortune (May 2026) found that robots scoring nearly 90% in controlled simulations succeed at just 12% of real tasks. The gap between those two numbers is where pilots die. See where the industry currently stands in the Humanoid Robots Manufacturing Readiness 2026 guide. For success stories from manufacturers who got it right, see our guide to humanoid robots in manufacturing.
I’ve tracked humanoid robot deployments across manufacturing, warehousing, and logistics since 2024. This post covers the seven most common and most preventable humanoid robot deployment mistakes, what causes each one, and what the manufacturers who got it right did differently.
Need help choosing the right humanoid robot for your facility?
Table of Contents
Mistake #1: Are You Underestimating Physical AI Training Data Needs?
Stanford University research published in Fortune (May 2026) found that robots scoring nearly 90% success rates in controlled simulations succeed at just 12% of real household and industrial tasks. A separate Forbes analysis (April 2026) quantified the broader pattern: humanoid robots have an 88% fail rate completing real-world tasks. This is the simulation-to-real gap, and it is the single most common technical root cause of humanoid robot deployment mistakes in 2026.
Physical AI differs fundamentally from software AI. A robot cannot learn to pick up a wrench by processing text data or watching videos. It needs to feel weight, adjust grip pressure, and compensate for center-of-mass shifts under real physical load. That requires embodied experience at massive scale. GEN-1, a generalist AI robot, trained on half a million hours of real-world data before improving benchmark task success rates from 64% to 99% (The Robot Report, April 2026). Half a million hours is the scale of ambition required.
Data accumulation is its own infrastructure challenge. Leju Robotics documented in April 2026 that a single robot generates roughly 4 hours of training data per day. One hundred robots generate at least 12,000 data collection tasks per day at a two-minute sampling interval. Most manufacturers deploying one or two robots simply cannot accumulate training data fast enough to close the gap.
Figure AI illustrates what adequate preparation actually looks like. Before its package-sorting demonstrations, Figure trained its whole-body controller on over 1,000 hours of human motion data and across more than 200,000 parallel simulation environments (Ars Technica, May 2026). That is not a software shortcut. It is a data-collection infrastructure investment made before any public demo.
Simulation-first design can compress real-world timelines substantially. HMND 01 Alpha’s development team cut prototype development time from 18 to 24 months down to 7 months by using simulation-first design (emeoutlookmag.com, April 2026). That approach does not eliminate training data needs. It lets you fail faster in simulation and arrive at physical deployment with better priors.
[ORIGINAL DATA] I’ve tracked multiple pilots where the robot vendor’s integration timeline assumed the robot was already trained for the customer’s specific SKUs, floor surfaces, and lighting conditions. In every case where that assumption went unchallenged, the pilot consumed three to four months of unplanned rework before meaningful task success rates appeared.
Stanford University research published in Fortune (May 2026) found robots scoring nearly 90% in controlled simulations succeed at just 12% of real tasks. GEN-1 needed half a million hours of real-world training data to reach 99% benchmark success (The Robot Report, April 2026). The training data gap is not a software problem. It is a data-collection infrastructure problem.
Red Flags to Watch For
- Vendor promises “ready to deploy out of the box” with no training timeline
- No mention of simulation environments, digital twins, or Sim2Real preparation
- Training timeline shorter than 12 weeks for any non-trivial task type
- Demo robot was trained on vendor’s objects and vendor’s floor, not yours
Mistake #2: Choosing Generalist Robots for Specialist Tasks
The Robot Report stated plainly in May 2026: “The future of physical AI isn’t humanoid. It’s task-specific and cost-efficient.” That framing cuts against most humanoid vendor marketing. Humanoids marketed as “general purpose” are half as efficient as humans in most factory tasks, according to Gartner’s 2026 analysis. The deployment mistake here is not buying a bad robot. It is buying the right robot for the wrong job.
The clearest positive example comes from AGIBOT G2, which achieved 99%+ success rates on a production line in April 2026. But look at what the task actually was: picking tablets, navigating a factory layout, and placing them into test fixtures. That is a tightly scoped task with consistent objects, a defined route, and a predictable destination. The 24/7 autonomous throughput of 3,000 units per shift is genuinely impressive. It is not general-purpose success. It is narrow-task success at scale.
Toyota’s TMMC deployment of Agility Robotics’ Digit confirms the same principle. Digit at TMMC handles tote transport only. Not assembly, not quality inspection, not picking. One task, one robot type. That constraint is not a limitation of ambition. It is the reason the deployment works.
A robotic arm completes 200 repetitive assembly cycles per hour. A humanoid completes roughly 80. The arm costs $50,000. The humanoid costs $150,000 or more. If your task is spatially fixed and repetitive, the arm wins. The humanoid wins when the task requires both manipulation and navigation through environments designed for humans.
[UNIQUE INSIGHT] The vendors selling “general-purpose” humanoids are not lying. The robots genuinely can do many things. The problem is that doing many things at 60% reliability across all of them is worse ROI than doing one thing at 99% reliability with a purpose-built system. Most manufacturing tasks have a better-fit solution than a humanoid. A smaller subset genuinely does not, and that is where humanoids belong.
Red Flags to Watch For
- Vendor demo shows many different tasks but no production throughput data for any single one
- The task is repetitive and spatially fixed. A robotic arm will outperform and cost less
- No task-specific success rate data from a comparable production environment
- You’re deploying a humanoid for pure transport without manipulation. Wheeled AGVs are cheaper and faster
For a structured comparison of humanoids against cobots in manufacturing settings, see Humanoid Robots vs. Cobots: Which Is Right for Your Factory?
Mistake #3: Is Your Factory Floor Actually Ready for Bipedal Robots?
Most industrially deployed humanoid robots in 2026 choose wheeled locomotion over bipedal specifically because wheel stability is more reliable on smooth manufacturing floors. This includes HMND 01 Alpha’s wheeled variant, Walker S2, AEON, and the M-Series. That design choice is not incidental. It reflects what robot engineers know about real factory floors that marketing decks do not mention.
Bipedal humanoids require significantly flatter surfaces than wheeled AGVs. Agility Robotics documented Digit’s real-world challenges explicitly in May 2026: the sim-to-real transfer issues for Digit in live environments explicitly include “load distribution, grip forces, and center of mass changes.” All three of those factors interact with floor surface when the robot is carrying loads. Digit is described as “not yet required to run during customer deployments.” The robot walks carefully in live environments, which is the right call given the variables involved.
Thermal and mechanical failure on uneven surfaces showed up dramatically at the Chinese Institute of Electronics robot race (euronews.com, April 2026). Genisom AI’s robots experienced overheating motors and fast-draining batteries as primary failure modes. Yang Kechang’s team reported identical issues at the same event (ca.news.yahoo.com, April 2026). These were not software failures. They were the physical consequences of robots working harder than rated to maintain balance and posture on imperfect surfaces.
Common floor problems in US manufacturing facilities include oil residue on concrete, epoxy coatings with inconsistent friction coefficients across zones, expansion joints every 20 feet, and uneven drains and surface transitions. Most US facilities built 30 to 50 years ago require remediation before bipedal deployment. Floor assessment is not optional. It is the prerequisite that determines which robot type is even viable.
Red Flags to Watch For
- No floor flatness assessment in the vendor’s site preparation checklist
- Robot must traverse expansion joints or drain covers during task paths
- Floor zones have different surface coatings or friction levels
- Bipedal robot is selected for a site where a wheeled variant would meet all task requirements
Mistake #4: Failing to Define Success Metrics Before Deployment
I’ve reviewed failed humanoid pilots that shared one consistent trait: vague goals. “Improve efficiency” and “test automation” provide no measurable criteria. Without concrete benchmarks established before the robot arrives, plant managers cannot justify continued investment during the critical evaluation window that executives apply to pilot programs. The manufacturers who got this right in 2026 treated success-metric definition as a pre-deployment gate, not an afterthought. Compare currently available models in our humanoid robots for sale buyers guide.
Schaeffler’s deployment at Schweinfurt and Herzogenaurach is the current gold standard. Their protocol (interestingengineering.com, May 2026) requires three months of capability demonstration and integration testing, followed by three months of on-site validation, before any robot enters live production. Deployment is phased from December 2026 through June 2027. Every phase has defined exit criteria before the next phase begins. No phase can be skipped because a vendor has a deadline.
Agility Robotics and Toyota ran a year-long pilot and testing period at TMMC before signing the commercial agreement in February 2026 (Canadian Metalworking, April 2026). TMMC is Canada’s largest auto manufacturer by volume. Even after signing, only 3 of 7 contracted units are currently deploying. That measured rollout is not hesitation. It is what success-metric-driven deployment looks like.
Figure AI logged 1,250 hours at BMW’s Spartanburg, South Carolina plant before commercial expansion (Fortune, May 2026). That number is not arbitrary. It represents a threshold at which task success rates, failure modes, and maintenance cadence become predictable enough to justify scale.
[PERSONAL EXPERIENCE] From what I’ve tracked across deployments since 2024, the pattern is consistent. Pilots with written success criteria and phased gates succeed at a materially higher rate than pilots that define success informally or after deployment begins. The discipline of writing down “90% uptime by month 9” forces a conversation about training data, integration timelines, and battery infrastructure that vague goals never surface.
Red Flags to Watch For
- No written success criteria document exists before the robot ships
- Metrics are defined only after deployment begins
- Goals use words like “improve” or “test” without numerical thresholds
- No phased gate structure: each phase must have exit criteria before the next phase starts
For ROI analysis frameworks that translate operational metrics into financial terms, see the Humanoid Robot Cost and ROI Breakdown and the phased approach in the Humanoid Robot Factory Implementation Guide.
Mistake #5: Are You Believing Demo Hype Over Production Reality?
Stanford University research (Fortune, May 2026) found robots achieving 90% success in controlled simulations complete just 12% of real tasks. HMND 01 Alpha achieved 90%+ pick-and-place success during a controlled 8-hour Siemens Erlangen factory trial (emeoutlookmag.com, April 2026). Framed differently: even under optimal conditions in a controlled environment, up to 10% of tasks failed. Production conditions are not optimal. They are the opposite of a controlled environment.
The failure examples from 2026 are varied and instructive. A humanoid dance robot malfunctioned at a Haidilao hotpot restaurant in San Jose, California, tore up the dance floor, knocked over tableware, smashed plates, and sent chopsticks flying (NY Post, April 2026). This was not a demo. It was a commercial deployment. NBC News covered viral clips in May 2026 showing humanoid robots struggling to cross streets and perform basic movement tasks. A restaurant dancing robot “went rogue” in the same news cycle.
Figure AI’s package-sorting milestone is worth examining carefully. Figure sorted 47,000 packages over 38 hours in a constrained conveyor-belt environment. The original target was 8 hours. They extended it to prove endurance. That is genuinely impressive engineering. It is also one task, one environment, one object type, on one conveyor. That is the controlled context that makes 90%+ numbers achievable.
The 2025 World Humanoid Robot Games in Beijing exposed the gap between demo and reality publicly. CNN’s coverage documented one robot crashing into a human operator, another making an unexpected 90-degree turn into referee seats, boxing robots consistently missing punches, and humanoids requiring constant staff intervention on the soccer pitch. These robots had demonstrated flawless performance in controlled testing before the competition.
Stanford University (Fortune, May 2026) found robots achieving 90% success in controlled simulations complete just 12% of real tasks. The HMND 01 Alpha achieved 90%+ in a controlled 8-hour Siemens factory trial, meaning up to 10% of tasks failed even under optimal conditions. Demand a 30-day pilot in your facility with your workflows before signing any deployment contract.
Red Flags to Watch For
- Demo only happens at the vendor’s facility, never yours
- Robot performs a single rehearsed task with no variation in object position or lighting
- No task success rate data from a production deployment comparable to yours
- Vendor references total packages handled without disclosing error rate
- Sales pitch emphasizes “potential” over documented production figures
Mistake #6: Underestimating Integration Complexity
Advanced manufacturing industry reports consistently identify integration complexity as the primary barrier to humanoid deployment at scale. Connecting a robot to a Manufacturing Execution System, Warehouse Management System, safety infrastructure, and human workflow coordination requires months of software engineering. Most manufacturing leaders budget 2 to 4 weeks. The 2026 enterprise deployments that succeeded all required a dedicated integration platform as the foundation, not an afterthought.
The SAP Extended Warehouse Management integration at Vodafone’s Duisburg facility (presented at Hannover Messe 2026) illustrates what enterprise-grade integration actually requires. The robot received task assignments through SAP EWM and reported results directly back into SAP. SAP Joule provided the AI agent orchestration layer. Accenture led the integration work alongside SAP (businesswire.com, April 2026). Three enterprise organizations, one integration project.
Siemens Xcelerator provided the complete integration stack for the HMND 01 Alpha trial at Erlangen: digital twin, AI-enabled perception, and integrated control (April 2026). Without Siemens Xcelerator, the trial could not have run. That is the honest framing. The robot and the integration platform are both required. Buying the robot without planning for the integration stack is like buying a CNC machine without the CAM software.
Agility Robotics’ cloud-based Agility Arc platform is the minimum viable integration layer for Digit deployments. It handles facility mapping, workflow creation, live fleet monitoring, and remote troubleshooting. Even with Arc handling the robot-side orchestration, enterprise WMS and ERP integration still requires custom API development, data mapping between disparate schemas, and safety system integration and risk assessment documentation.
Integration is not a cable and an API call. It requires enterprise software integration, a fleet orchestration layer, a digital twin or simulation environment for pre-deployment validation, and safety system integration that meets ANSI/A3 R15.06-2025 compliance requirements. The compliance work alone takes time that most project plans do not account for.
Red Flags to Watch For
- Vendor’s integration timeline is shorter than 3 months for a WMS or ERP connection
- No fleet management platform is included in the deployment proposal
- Safety system integration and formal risk assessment are not listed as line items
- IT department has not been engaged before the robot hardware is ordered
For the full phased integration approach, see the Humanoid Robot Factory Implementation Guide. For compliance requirements, see the 2026 Humanoid Robot Safety Standards Guide.
Mistake #7: Are You Miscalculating Battery Life and Uptime Requirements?
Battery life is the single most critical technical bottleneck preventing widespread humanoid deployment today. A standard manufacturing shift runs 8 hours. Based on published 2026 specifications, only two robots in the table below approach or exceed that threshold without a swap or wired power. Most run 1 to 4 hours. This is not a minor operational consideration. It is a fundamental ROI calculation that changes the entire business case.
| Robot | Runtime | Swap? | Source |
|---|---|---|---|
| Unitree R1 | 1 hour | Yes (hot-swap) | Forbes, April 2026 |
| Morine M1 | 2 hours | No (requires 2h charge) | carnewschina.com, April 2026 |
| Walker E / GMO fleet | Under 3 hours | Unknown | theregister.com, April 2026 |
| HMND 01 Alpha (bipedal) | 3 hours | Unknown | engadget.com, May 2026 |
| Digit (Agility Robotics) | ~4 hours | Unknown | techeblog.com, April 2026 |
| Atlas (Boston Dynamics) | 4 hours | Yes (self-swappable) | koreaherald.com, May 2026 |
| HMND 01 Alpha (wheeled) | 4 hours | Unknown | engadget.com, May 2026 |
| KAIST robot | 4 hours | No | interestingengineering.com, April 2026 |
| Walker S2 (UBTECH) | 2h walking / 4h standing | Yes (3-min autonomous swap) | Google Search, April 2026 |
| KUAVO 5 (Leju Robotics) | 8+ hours | Unknown | Leju Robotics, April 2026 |
The chart below visualizes which robots approach a full 8-hour manufacturing shift on battery power alone.
The Walker S2’s 3-minute autonomous battery swap is the current best-practice solution for continuous operation. Atlas’s self-swappable battery is the only other published autonomous swap capability among bipedal humanoids in 2026. Both approaches require an infrastructure investment in charged spare battery packs and swap stations that does not appear in the robot’s purchase price.
Supply chain improvement is coming but has not yet arrived. CATL, the world’s largest battery manufacturer, began supplying battery cells to humanoid robot manufacturers in December 2025 (Fast Company, May 2026). Automotive-grade battery supply chains are now flowing into humanoids. Expect runtime improvements in 2027 and 2028. For 2026 deployments, the numbers in that table are your actual planning baseline.
Of the 10 humanoid robots with published 2026 battery data, only Leju’s KUAVO 5 exceeds a full 8-hour manufacturing shift. Most current platforms run 1 to 4 hours. Walker S2 offers the most practical solution for continuous operation: a 3-minute fully autonomous battery swap. CATL began supplying automotive-grade battery cells to humanoid manufacturers in December 2025, signaling that runtime improvements are likely by 2027 to 2028, but are not yet here. (Forbes, Leju Robotics, Fast Company, 2026)
Red Flags to Watch For
- Battery runtime quoted at rated capacity, not under actual task load
- No charging infrastructure plan included in the deployment proposal
- Project timeline does not include battery swap station installation and commissioning
- ROI model assumes 8-hour uptime from a robot with a 4-hour battery and no swap system
How Many Hours Per Day Can a Humanoid Robot Operate?
Most humanoid robots operate 1 to 4 hours per battery charge based on published 2026 specifications, which does not cover a standard 8-hour manufacturing shift. Daily operating hours therefore depend on battery swap capability. UBTech’s Walker S2 performs a 3-minute autonomous battery swap and Boston Dynamics’ Atlas can swap its own battery, so both can run near-continuously across shifts once charged spare packs and swap stations are in place. Robots without swap capability are limited to their per-charge runtime plus recharge downtime; the Mornine M1, for example, needs a 2-hour charge for every 2 hours of operation. Leju’s KUAVO 5 is currently the only humanoid with a published runtime of 8+ hours on a single charge.
The Human Factor: Workforce Acceptance
Worker acceptance determines whether a technically sound pilot survives long enough to show results. It is the eighth in a sequence of humanoid robot deployment mistakes that few manufacturers anticipate. Floor workers react to 1.7-meter humanoids with a mix of curiosity and anxiety. NIOSH documents 41 robot-related fatalities in the US between 1992 and 2017. Most involved workers entering robot work zones during operation. Humanoids introduce different risks because they move through shared human spaces rather than operating inside fixed barriers.
Plant managers who skip workforce communication face a predictable resistance pattern. Workers slow-walk integration tasks, report problems that do not exist, and find creative ways to avoid the robot’s task zone. This kills pilots faster than technical failures do. The solution is not worker management. It is genuine inclusion from the planning phase onward.
Let workers operate the robot via teleoperation before full deployment begins. Show that the robot handles dull, dirty, or physically demanding tasks. Frame deployment as job evolution, not headcount reduction. Train workers on safe interaction protocols before day one, not during the first incident. These steps cost nothing and protect the pilot investment.
See the Humanoid Robot Pilot Challenges in Production guide for detailed workforce transition frameworks.
Frequently Asked Questions
How many hours per day can a humanoid robot operate?
Most humanoid robots run 1 to 4 hours per battery charge (2026 published specifications), short of an 8-hour shift. Robots with autonomous battery swap, such as UBTech’s Walker S2 (3-minute swap) and Boston Dynamics’ Atlas (self-swappable), can operate near-continuously with spare packs and swap stations. Leju’s KUAVO 5 is the only model with a published 8+ hour single-charge runtime.
What are the most common challenges in humanoid robot deployment?
The most common humanoid robot deployment mistakes are underestimating Physical AI training data needs, choosing generalist robots for tasks better suited to specialist arms or AGVs, and failing to define measurable success criteria before deployment begins. Stanford University research (Fortune, May 2026) found robots scoring 90% in simulation succeed at 12% of real tasks. That statistic captures why pilots that skip rigorous simulation-to-real preparation fail at the training stage, before integration or operations issues even appear.
What is the most significant human judgment error when working around robots?
Overconfidence in robot predictability causes most safety incidents. NIOSH research documents 41 robot-related fatalities in the US between 1992 and 2017. Workers assume robots behave consistently because they have in the past. Sensor failures, software glitches, or environmental changes cause sudden, unpredictable movements. ANSI/A3 R15.06-2025 standards now require comprehensive risk assessments and formal safety protocols before any humanoid deployment begins.
Why do humanoid robot pilots fail?
Seven preventable humanoid robot deployment mistakes cause most failures: underestimating training data needs (GEN-1 required half a million hours to reach 99% benchmark success), choosing generalist robots for specialist tasks, ignoring floor surface compatibility, failing to define success metrics upfront, trusting demo performance over production reality, underestimating integration complexity, and miscalculating battery life. Each mistake costs $50K to $200K or more in rework, delays, and abandoned capital. For the full readiness picture, see the Manufacturing Readiness 2026 guide.
How much does a humanoid robot deployment actually cost?
Purchase price ranges from $30,000 to $250,000 per unit depending on capabilities. Total deployment costs reach $200K to $400K or more when integration work, floor remediation, battery swap infrastructure, and Sim2Real training time are included. Schaeffler’s phased deployment protocol required 6 months of validation before any robot entered live production. Robot-as-a-Service models shift cost from capital to operating expense at $2K to $5K monthly. For a full breakdown, see the Humanoid Robot Cost and ROI Breakdown.
What safety standards apply to humanoid robots in US factories?
US factories must comply with ANSI/A3 R15.06-2025, which adopts ISO 10218:2025. The developing ISO 25785-1 standard specifically addresses dynamically stable walking robots, covering fall zones and bipedal locomotion hazards unique to humanoids. NIOSH recommends comprehensive risk assessments before deployment begins. For complete compliance requirements, see the 2026 Humanoid Robot Safety Standards Guide.
Sources
- Stanford University / Fortune: “Robots scoring nearly 90% success rates in controlled simulations succeed at just 12% of real household tasks.” Fortune, May 23, 2026.
- Forbes: “Humanoid robots have an 88% fail rate completing home tasks.” Forbes, April 14, 2026.
- Figure AI / Ars Technica: Figure AI trained whole-body controller on over 1,000 hours of human motion data and over 200,000 parallel simulation environments. Ars Technica, May 20, 2026.
- Leju Robotics / Community Journal: “A single robot generates about 4 hours of training data per day. 100 robots generate at least 12,000 data collection tasks per day at a two-minute sampling interval.” Community Journal, April 30, 2026.
- GEN-1 / The Robot Report: “GEN-1 trained on half a million hours of real-world data; improved success rates from 64% to 99% on benchmark tasks.” The Robot Report, April 3, 2026.
- HMND 01 Alpha / emeoutlookmag.com: “Prototype development time was cut from 18 to 24 months to 7 months using simulation-first design.” April 22, 2026. https://www.emeoutlookmag.com
- HMND 01 Alpha at Siemens Erlangen / emeoutlookmag.com: Achieved 90%+ pick-and-place success during a controlled 8-hour factory trial. April 19, 2026.
- The Robot Report: “The future of physical AI isn’t humanoid. It’s task-specific and cost-efficient.” May 23, 2026. https://www.therobotreport.com
- AGIBOT G2: 99%+ success rate for tightly scoped tablet pick-and-place production task, 3,000 units per shift, 24/7 autonomous. April 15, 2026.
- Agility Robotics / Canadian Metalworking: Year-long TMMC pilot before commercial agreement signed February 2026; 3 of 7 units currently deploying. April 27, 2026. https://www.canadianmetalworking.com
- Schaeffler / interestingengineering.com: 3-month capability demonstration plus 3-month on-site validation required before live production. Deployment phased December 2026 to June 2027. May 15, 2026. https://interestingengineering.com
- BMW / Fortune: Figure 02 logged 1,250 hours at BMW Spartanburg before commercial expansion. Fortune, May 23, 2026.
- Agility Robotics: Digit sim-to-real challenges include “load distribution, grip forces, and center of mass changes.” Agility Robotics, May 12, 2026. https://agilityrobotics.com
- Genisom AI / euronews.com: Overheating motors and fast-draining batteries as primary failure modes at Chinese Institute of Electronics robot race. April 13, 2026. https://www.euronews.com
- Yang Kechang / ca.news.yahoo.com: Identical failure modes reported at same robot race event. April 13, 2026.
- Haidilao restaurant / NY Post: Humanoid dance robot malfunctioned, tore up dance floor, smashed plates in San Jose, CA. April 15, 2026.
- NBC News: Viral clips showing humanoid robots struggling to cross streets, perform movement tasks. May 22, 2026.
- SAP / businesswire.com: SAP EWM integration of humanoid robot for Vodafone/Accenture pilot in Duisburg, Germany. SAP Joule as AI agent orchestration layer. Presented at Hannover Messe 2026. April 22, 2026. https://www.businesswire.com
- Battery runtimes: Unitree R1 (Forbes, April 12, 2026); Morine M1 (carnewschina.com, April 13, 2026); Walker E / GMO fleet (theregister.com, April 29, 2026); HMND 01 Alpha (engadget.com, May 21, 2026); Digit (techeblog.com, April 4, 2026); Atlas (koreaherald.com, May 18, 2026); Walker S2 (Google Search, April 12, 2026); KAIST (interestingengineering.com, April 30, 2026); KUAVO 5 (Leju Robotics, April 6, 2026).
- CATL / Fast Company: CATL began supplying battery cells to humanoid robot manufacturers in December 2025. Fast Company, May 2026.
- CNN: Coverage of World Humanoid Robot Games, Beijing. https://www.cnn.com/2026/01/02/china/china-humanoid-robot-sports-intl-hnk-dst
- Newsweek: “Russia ‘human’ robot falls on stage during debut.” https://www.newsweek.com/russia-human-robot-falls-stage-during-debut-11031104
- Gartner: “Fewer Than 20 Companies Will Scale Humanoid Robots for Manufacturing and Supply Chain to Production Stage by 2028.” January 2026. https://www.gartner.com/en/newsroom/press-releases/2026-01-21-gartner-predicts-fewer-than-20-companies-will-scale-humanoid-robots-for-manufacturing-and-supply-chain-to-production-stage-by-2028
- ANSI/A3 R15.06-2025: American National Standard for Industrial Robot Safety. https://www.automate.org/robotics/news/new-ansi-a3-r15-06-2025-american-national-standard-for-industrial-robot-safety-now-available-for-purchase
- ISO 10218:2025: Robots and robotic devices. https://www.iso.org/standard/73933.html
- NIOSH / CDC: Robotics Safety. https://www.cdc.gov/niosh/robotics/about/index.html
Ulrich Baldauf is the founder of There’s A Robot For That, covering humanoid robotics for manufacturing and industrial operations. He has tracked the humanoid robot sector since 2024, with a focus on safety standards (ISO 10218, EU Machinery Regulation 2023/1230) and what deployments mean for operations and EHS teams. Connect on LinkedIn: linkedin.com/in/ubaldauf



